Research
Goal: Robot Technologies for All

The ultimate goal is to develop robot technologies to support all people. They include the person who is so healthy to do everything but has several issues that cannot be solved by her/his own. I believe that robot technologies are useful even when not using robots.
Research Topics
Real Robots in Real Life



I believe that robots working in everyday life are expected to give us not only task achievement but also satisfaction, comfort, familiarity, etc. To realize the latter aspects, it is necessary to consider the following things: real-time motion generation, on-time service, safety, natural motion, and motion to provide good feeling. By actually developing the robots that satisfy them in a trial-and-error manner, I attempt to realize real robots that can work in real life.
- Real-time reaching motion generation for a humanoid robot
- A humanoid robot pushing an object in natural speed
- Pouring from deformable containers
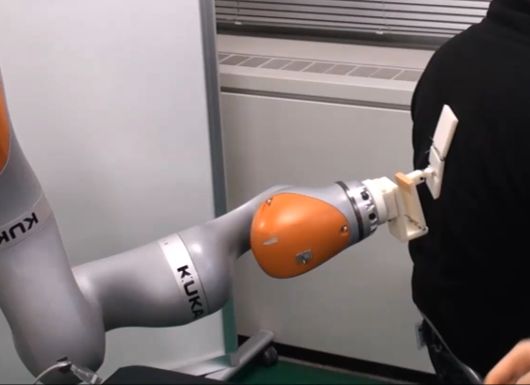
- Safety in human-robot interaction
- Obtaining semantic information by aligning an occupancy grid map and a floor map
- A mobile robot under Dynamic Crowded Environment
Affective Robots


Robots provide us not only physical support but also emotional comforts through human-robot interaction. Thanks to the progress of co-working robots, physical interaction is becoming possible by such affective robots. Further, affective robots are used as tools for clarifying psychological issues.
- Real-time human-tobot interaction by an android based on motion database
- Robot hands for affective touch
- Impression of changes of eye contact and blinking
- Control of face and eyes of an Android and its application
Factory Automation in Next Generation


Though robots are getting to work in our daily life, the factory is the most significant place for robots. Future factory automation requires us much reducing the efforts for the deployment of the robots while getting contributions from the state-of-the-art (and classical) AI technologies.
- A fully automated annotation approach without any manual intervention using visual markers
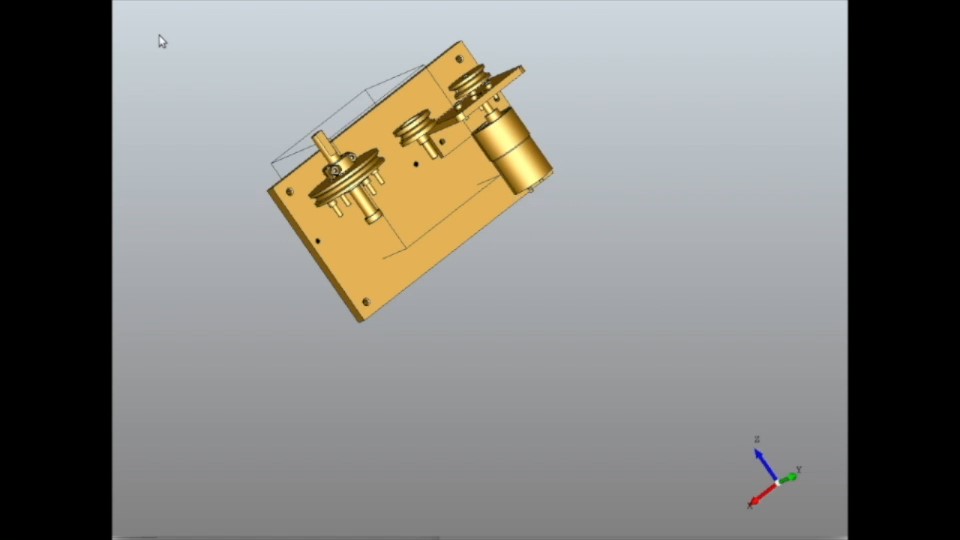
- Generating assembly sequence of many parts only from CAD
- Packing planning and execution considering arrangement rules
Next Step of Learning-from-Observation Paradigm
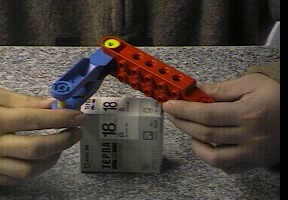
My research origin is to develop the framework to automatically generate robot programming for assembly tasks and knot tying tasks from observation of human demonstration. I developed top-down-based task recognition (e.g., task models) and combine with skill-based manipulation. Consider the case where a person performs the task at the first time, she/he uses experience (e.g. transfer learning) and gets contents of the task not only from the demonstration but for example, the textbook. I believe that the next step of learning-from-observation paradigm relies not only on observation of the demonstration but also the multi-modal communication.
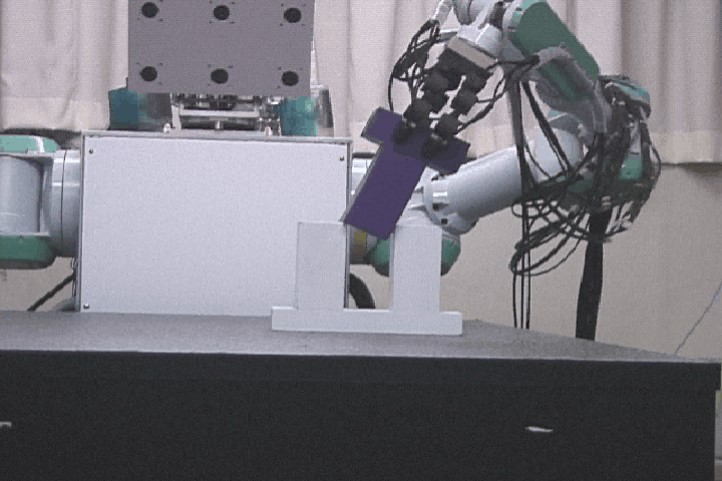
- Task models for assembly tasks
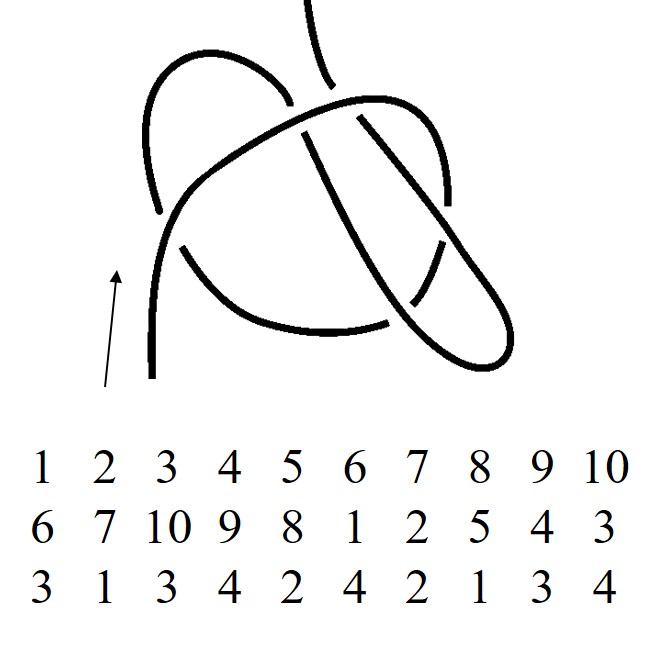
- Task models for knot-tying tasks
- Estimation of joint parameters from observation
- A service robot based on DCNN-based generic object recognition and ontology
Applications of Robot Technologies without Robots
Though we have a chance to meet service robots, such as pepper, in everyday life, almost all the robots work far from our spaces. I believe that robot technologies are useful even for the person who does not own robots. I am searching for the possibility of the robot technologies by making the interdisciplinary relationship to, for example, researchers on home economics and on archeology.
- Tools for reviewing everyday life in home economics
- Information archeology based on 3D Shape Manipulation (only Japanese)